Toxic Waste Disposal
A critical mission awaits: your robot must transport a microcontroller-equipped “toxic waste” barrel through an obstacle course before it goes critical. The course features a dark box, a 20° ramp, and a grass square, each adding its own challenge. Your goal? Collect and securely place the barrel without jostling it beyond a safe threshold—and get your robot back to the start before time runs out.
Rules & Scoring
-
Time Limit
You have 5 minutes to complete your run. The timer starts as soon as your robot crosses into the marked Start Square on the floor and stops when it fully returns to that same square. -
Allowed Interventions
No pausing is allowed during the run. We have limited time and pausing would disrupt the flow of the event. In rare “extreme” situations (e.g., total battery failure), staff may allow a brief fix at their discretion, but your robot should be robust enough to avoid these issues. -
Penalties & Points
Details on scoring (including jostling thresholds for the toxic barrel) and any penalties will be published separately in the Judging section during the hackathon. Keep an eye out for updates!
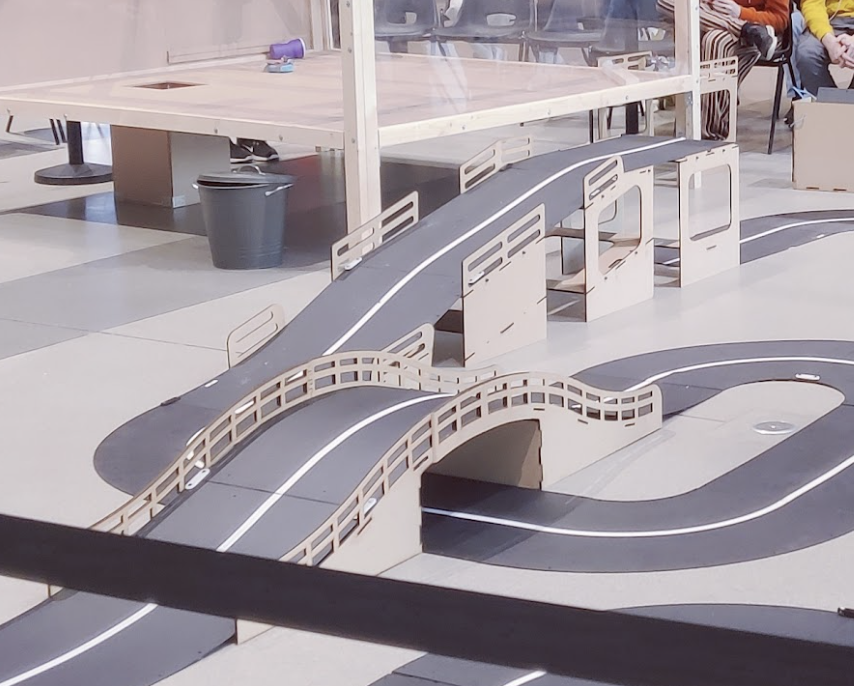
Arena & Obstacles
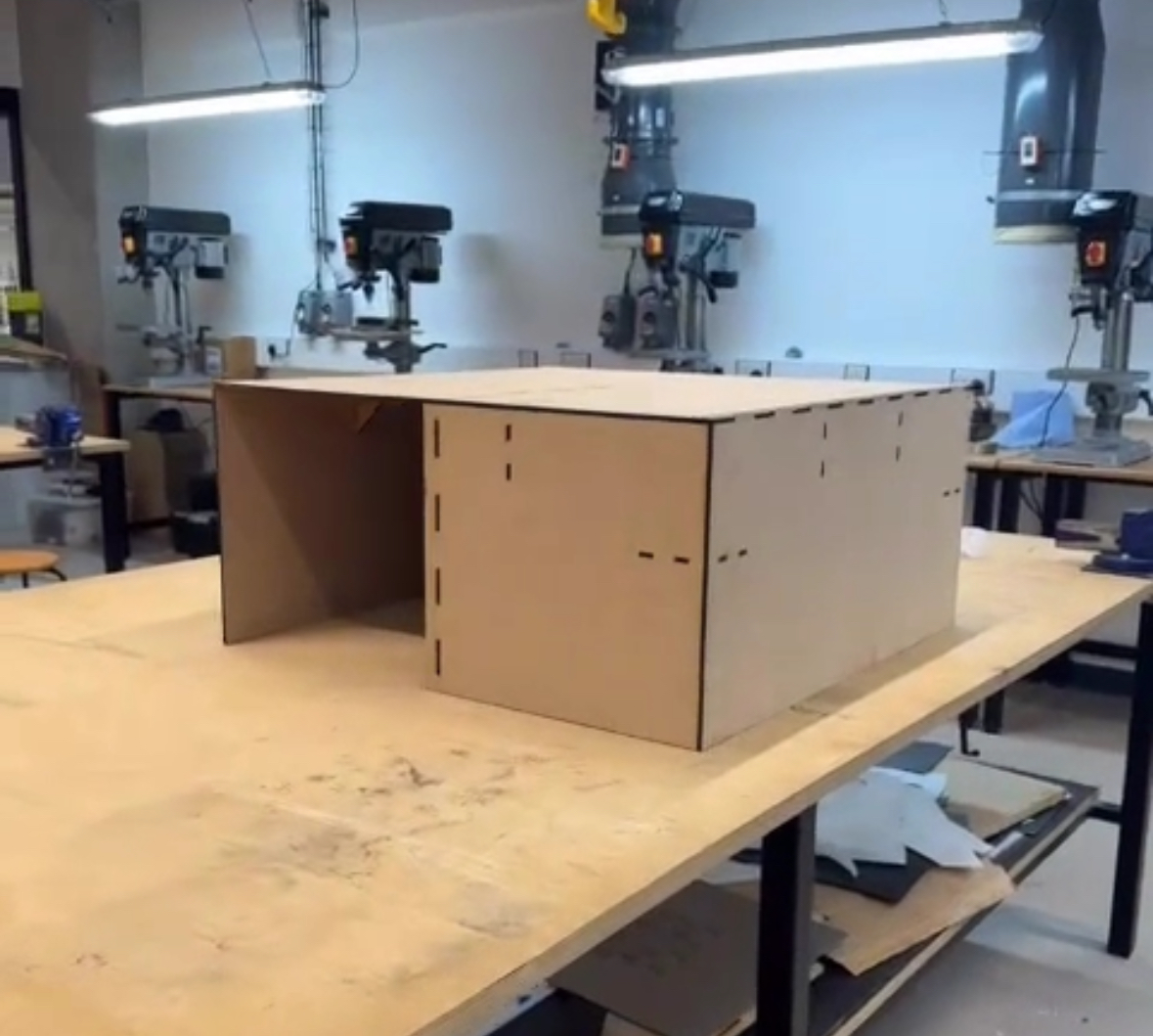 |  |  |
|---|---|---|
| Dark Box Size: (e.g. 1m³) Lighting: Very dim Access: Single door on one side | 20° Ramp Height: ~1m (20° incline) Surface: Wood or acrylic Approach: 30cm run-up | Grass Square Surface: Artificial turf Friction: Medium-High Dimensions: 50cm x 50cm |
Kit Contents
| Item | Description |
|---|---|
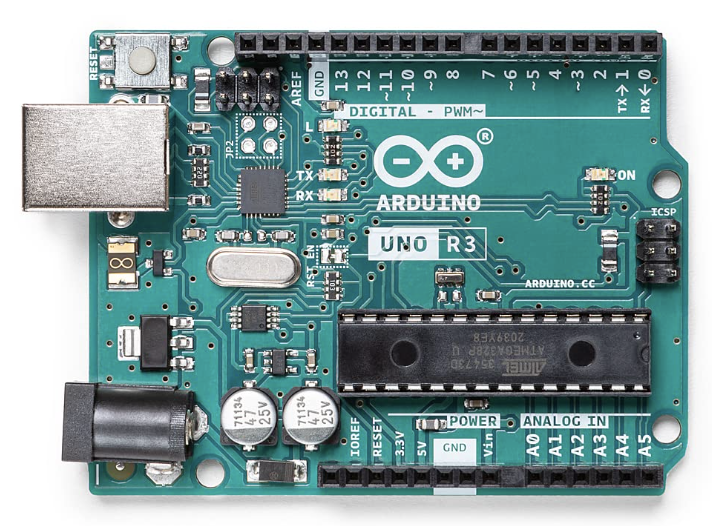 Arduino Uno | A classic microcontroller board for prototyping. Usually 5V logic; great for sensor hookups and basic control logic. |
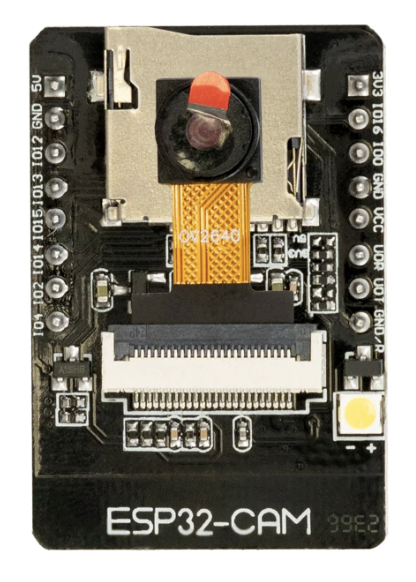 ESP32 Camera Module | Provides on-board Wi-Fi, Bluetooth, and camera functionality. Great for streaming video or applying simple computer vision tasks. |
 Motors | Basic DC motors for driving wheels or other mechanisms. You’ll likely receive 2–4 of these, depending on your rover configuration. |
 Wheels | Accompanying wheels to attach to the motors. |
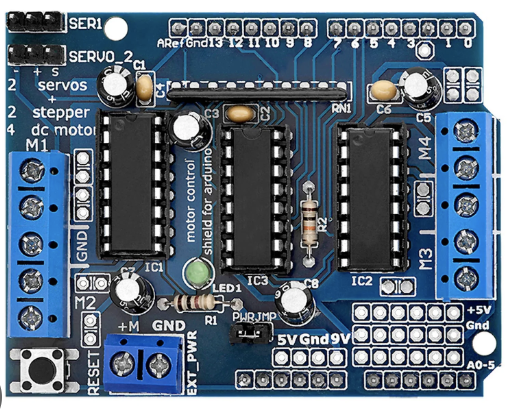 Motor Driver Breakout Board | The l293d module. Handles current flow to your motors. Attach it to the Arduino/ESP32 for motor control signals. |
 Servos (SG90) | Small, lightweight servos. Often used for steering or simple grippers. Supplied as a pack of 4. |
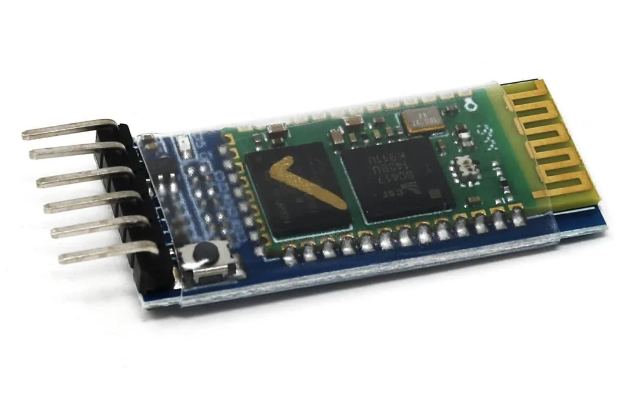 HC-05 Bluetooth Module | Allows simple serial communication over Bluetooth. Useful for sending instructions wirelessly. |
| Battery Case | Holds AA batteries for powering your circuit. |
| AA Batteries | Basic 1.5V cells (quantity depends on your kit). |
| USB-B Cable | Used for programming and providing power to the Arduino Uno. |
| Micro USB Cable | For programming the ESP32 Camera Module. |
| Jumper Wire Pack (MM, MF, FF) | Essential for quick prototyping and connecting components on breadboards. |
Additional Items
Need extra sensors, parts, or specialized tools? Request them through the standard inventory parts procedure.
👉 View the full inventory
Modifications
We encourage creativity! Feel free to 3D-print custom parts (no special approvals required, beyond standard 3D Printing Guidelines). You can even head to Tesco and build your chassis out of a meal deal sandwich box — no problem.
- No Weight Limits: However, remember the robot needs to fit through the Dark Box entrance. We’ll publish recommended size limits once we finalize the Dark Box dimensions.
- Go Wild: As long as you stay safe, your design approach is up to you!
Safety & Handling
-
Barrel Handling
There are no strict pick-up or drop-off guidelines—your primary goal is to minimize side-to-side movement and avoid dropping or throwing the barrel. Any excessive jostling or unsafe handling may lead to point deductions (details to be released in the scoring guidelines). -
Recovery Procedures
If the barrel is dropped but stays within the sensor’s acceptable threshold, no penalty is applied. However, repeated or severe drops may register on the microcontroller, potentially incurring future deductions. -
Monitoring Tools
You have full access to:- Bluetooth communication with your robot and the barrel’s microcontroller.
- Wi-Fi features on the ESP32 Camera Module (e.g., for video streaming).
Feel free to integrate real-time data into your control system—just keep the barrel’s movement gentle!
Barrel Information
To help you design your robot around the toxic waste barrel, we’ve provided technical drawings, dimensions, and guidance on how best to move it.
Barrel Dimensions
A detailed technical drawing is added below. This will include:
- Height, diameter, and clearance zones
- Mounting points (if any) or typical center of mass
- Side, top, and bottom views
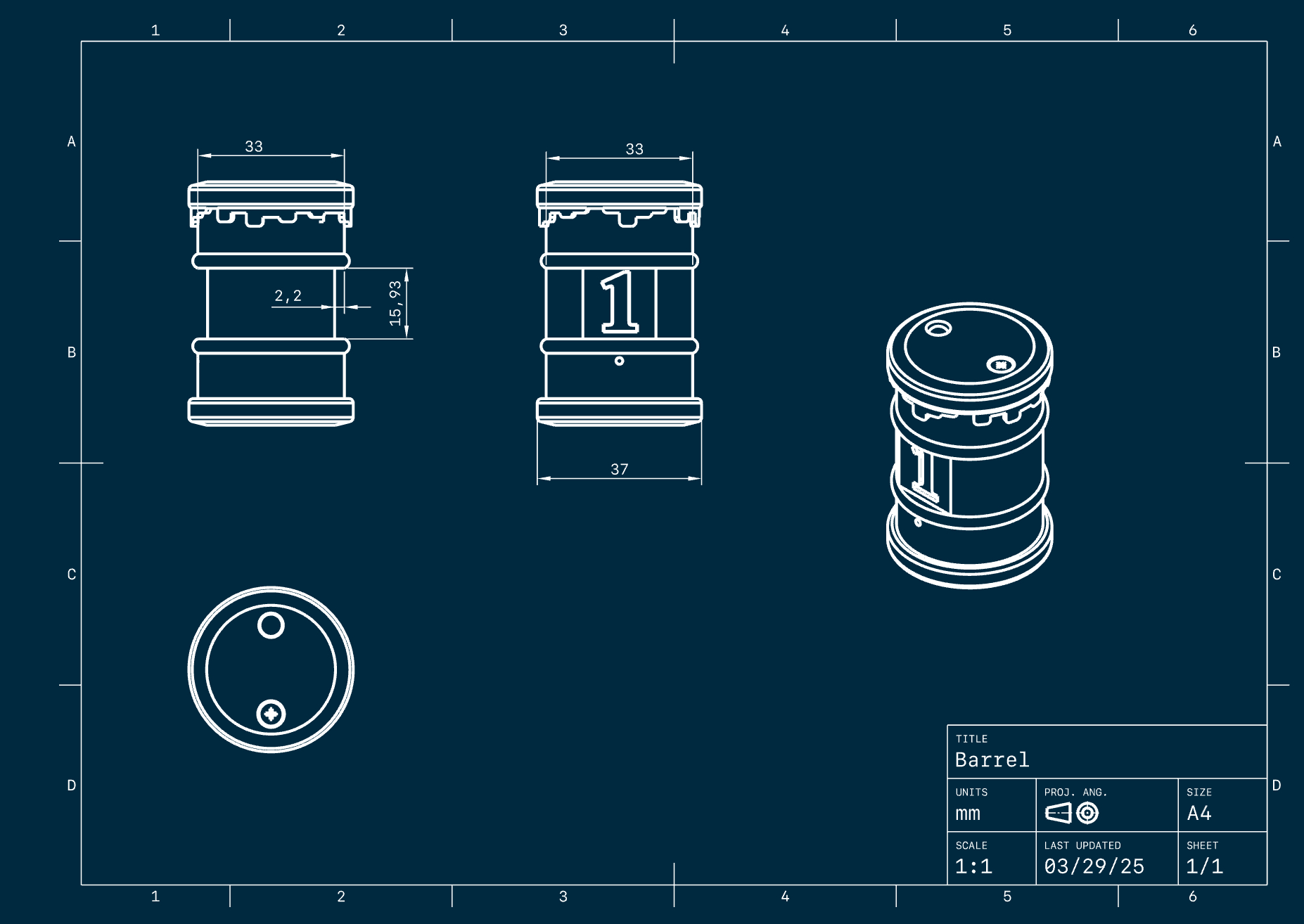
↑ Barrel diagram
Handling Recommendations
You are free to design any mechanism to carry or stabilize the barrel — just make sure your robot minimizes sudden movements and avoids dropping it.
Some common solutions include:
-
Servo Claws
Use two SG90 servos (included in your kit) with L-shaped 3D-printed arms or laser-cut panels to grip the barrel from either side. -
Suspended Platform
Create a U-shaped frame with the barrel resting in a low cradle. One servo can tilt the cradle forward for release. -
Drop-in Basket + Gate
A passive “basket” with a servo-powered gate or latch to hold the barrel in place until it’s time to release it. -
Wedge + Friction Pads
Use angled arms or a foam-lined container to gently wedge the barrel in place with minimal grip force.
You’re encouraged to prototype creatively, but remember:
- The barrel contains a sensitive microcontroller with sensors — it will detect sharp impacts and side-to-side motion.
Barrel Reference Image
Here’s a look at the 5 barrels used across the event:

↑ All 5 toxic waste barrels used during the challenge
Practice & Testing
-
Arena Access Times
Once the arena is fully assembled, it will be open for practice. Feel free to come by anytime to test your robot’s movement and barrel-handling strategies. -
Booking / Sign-Up
For official judging, teams only need to provide their team name; the order of attempts will be randomly assigned once everyone has signed up. Otherwise, there’s no formal booking system for practice—you can just show up. -
Limitations
Currently, no specific restrictions (e.g., max attempts or time slots) have been set for practice sessions. We’ll notify participants via announcements if any become necessary.
Submission & Demo
-
Code Submission
There’s no official requirement to submit your code. However, if you’ve built something especially cool and want to share it, feel free to show it off or upload it somewhere (e.g., GitHub) and let others know. -
Judging Format
We’ll run a final demonstration (“final run”) for each team. If your robot fails at that time, unfortunately there won’t be a second attempt—too many teams, too little time! So make sure everything is reliable before your slot. -
Results & Feedback
Winners and feedback will be announced during the closing ceremony (see the Schedule) along with prize presentations. Keep an eye on announcements for any last-minute details.
Tips & Common Mistakes
- (Quick bullet points or FAQs about typical challenges, e.g., ramp friction, battery life, sensor calibration, etc.)
- This will be updated as the event proceeds
Resources & References
- (Links to tutorials, official docs, or example code if provided.)
- This will be updated as the event proceeds